Operations Research Transactions ›› 2023, Vol. 27 ›› Issue (4): 106-135.doi: 10.15960/j.cnki.issn.1007-6093.2023.04.006
Previous Articles Next Articles
Xiangfeng WANG1,*( ), Wenhao LI2
), Wenhao LI2
Received:2023-05-04
Online:2023-12-15
Published:2023-12-07
Contact:
Xiangfeng WANG
E-mail:xfwang@sei.ecnu.edu.cn
CLC Number:
Xiangfeng WANG, Wenhao LI. Machine learning-driven multi-agent pathfinding: An overview[J]. Operations Research Transactions, 2023, 27(4): 106-135.
"

"


"

"

"
"

"

"

"
"
| 算法 | 候选经典算法 |
| Kaduri等人[ | 基于A* 的搜索算法[ |
| Sigurdson等人[ | 解耦MAPF算法[ |
| Ren等人[ | 分层MAPF算法[ |
| Alkazzi等人[ | 分层MAPF算法[ |
| 1 | Stern R, Sturtevant N, Felner A, et al. Multi-agent pathfinding: Definitions, variants, and benchmarks[J]. 2019, arXiv: 1906.08291. |
| 2 |
QiuT,ChengY.Applications and challenges of deep reinforcement learning in multi-robot path planning[J].Journal of Electronic Research and Application,2021,5(6):25-29.
doi: 10.26689/jera.v5i6.2809 |
| 3 |
MaH.Graph-based multi-robot path finding and planning[J].Current Robotics Reports,2022,3(3):77-84.
doi: 10.1007/s43154-022-00083-8 |
| 4 |
HönigW,KieselS,TinkaA,et al.Persistent and robust execution of MAPF schedules in warehouses[J].IEEE Robotics and Automation Letters,2019,4(2):1125-1131.
doi: 10.1109/LRA.2019.2894217 |
| 5 | Li J, Tinka A, Kiesel S, et al. Lifelong multi-agent path finding in large-scale warehouses[C]//Association for the Advancement of Artificial Intelligence, 2021. |
| 6 | Varambally S, Li J, Koenig S. Which MAPF model works best for automated warehousing?[C]//Symposium on Combinatorial Search, 2022. |
| 7 |
WenL,LiuY,LiH.CL-MAPF: Multi-agent path finding for car-like robots with kinematic and spatiotemporal constraints[J].Robotics and Autonomous Systems,2022,150,103997.
doi: 10.1016/j.robot.2021.103997 |
| 8 | Huang T, Liu J, Zhou X, et al. V2X cooperative perception for autonomous driving: Recent advances and challenges[J]. 2023, arXiv: 2310.03525. |
| 9 | ChandraR,MaligiR,AnantulaA,et al.Optimal and efficient multiagent path finding with strategic agents for social navigation[J].IEEE Robotics and Automation Letters,2023, |
| 10 | Calderón-Arce C, Solis-Ortega R, Bustillos-Lewis T. Path planning on static environments based on exploration with a swarm robotics and RRG algorithms[C]//2018 IEEE 38th Central America and Panama Convention, 2018: 1-6. |
| 11 | Calderón-ArceC,Solis-OrtegaR.Swarm robotics and rapidly exploring random graph algorithms applied to environment exploration and path planning[J].International Journal of Advanced Computer Science and Applications,2019,10(5) |
| 12 |
FeketeS P,KeldenichP,KosfeldR,et al.Connected coordinated motion planning with bounded stretch[J].Autonomous Agents and Multi-Agent Systems,2023,37(2):43.
doi: 10.1007/s10458-023-09626-5 |
| 13 | Zhang Y, Qian Y, Yao Y, et al. Learning to cooperate: Application of deep reinforcement learning for online AGV path finding[C]//International Joint Conference on Autonomous Agents and Multi-Agent Systems, 2020. |
| 14 | Kou N M, Peng C, Ma H, et al. Idle time optimization for target assignment and path finding in sortation centers[C]//Association for the Advancement of Artificial Intelligence, 2020. |
| 15 | Kou N M, Peng C, Yan X, et al. Multi-agent path planning with non-constant velocity motion[C]//International Joint Conference on Autonomous Agents and Multi-Agent Systems, 2019. |
| 16 | Guo T, Yu J. Sub-1.5 time-optimal multi-robot path planning on grids in polynomial time[J]. 2022, arXiv: 2201.08976. |
| 17 | Shi D, Tong Y, Zhou Z, et al. Adaptive task planning for large-scale robotized warehouses[C]//International Conference On Data Engineering, 2022. |
| 18 | Li W, Chen H, Jin B, et al. Multi-agent path finding with prioritized communication learning[C]//International Conference on Robotics and Automation, 2022. |
| 19 | Shi D, Zhou N, Tong Y, et al. Collision-aware route planning in warehouses made efficient: A strip-based framework[C]//International Conference on Data Engineering, 2023. |
| 20 | Surynek P. Towards optimal cooperative path planning in hard setups through satisfiability solving[C]//Pacific Rim International Conference on Artificial Intelligence, 2012. |
| 21 |
YuJ,LaValleS M.Optimal multirobot path planning on graphs: Complete algorithms and effective heuristics[J].IEEE Transactions on Robotics,2016,32(5):1163-1177.
doi: 10.1109/TRO.2016.2593448 |
| 22 | Gómez R N, Hernández C, Baier J A. Solving sum-of-costs multi-agent pathfinding with answer-set programming[C]//Association for the Advancement of Artificial Intelligence, 2020. |
| 23 | Luna R, Bekris K E. Push and swap: Fast cooperative path-finding with completeness guarantees[C]//International Joint Conference on Artificial Intelligence, 2011. |
| 24 | De Wilde B, Ter Mors A W, Witteveen C. Push and rotate: Cooperative multiagent path planning[C]//International Foundation for Autonomous Agents and Multiagent Systems, 2013. |
| 25 |
YuJ.Average case constant factor time and distance optimal multi-robot path planning in well-connected environments[J].Autonomous Robots,2020,44(3-4):469-483.
doi: 10.1007/s10514-019-09858-z |
| 26 | Standley T. Finding optimal solutions to cooperative pathfinding problems[C]//Association for the Advancement of Artificial Intelligence, 2010. |
| 27 | Wagner G, Choset H. A complete multirobot path planning algorithm with performance bounds[C]//Institute of Electrical and Electronics Engineers, 2011. |
| 28 | Ferner C, Wagner G, Choset H. Optimal multirobot path planning in low dimensional search spaces[C]//International Conference on Robotics and Automation, 2013. |
| 29 | Surynek P. An optimization variant of multi-robot path planning is intractable[C]//Association for the Advancement of Artificial Intelligence, 2010. |
| 30 | Yu J, LaValle S. Structure and intractability of optimal multi-robot path planning on graphs[C]//Association for the Advancement of Artificial Intelligence, 2013. |
| 31 | Sartoretti G, Koenig S, Choset H. A combined learning-and search-based approach to complete multi-agent path finding[C]//International Joint Conference on Artificial Intelligence, 2019. |
| 32 | Paul S, Deshmukh J V. Multi agent path finding using evolutionary game theory[J]. 2022, arXiv: 2212.02010. |
| 33 |
SartorettiG,KerrJ,ShiY,et al.Primal: Pathfinding via reinforcement and imitation multi-agent learning[J].IEEE Robotics and Automation Letters,2019,4(3):2378-2385.
doi: 10.1109/LRA.2019.2903261 |
| 34 | Reijnen R, Zhang Y, Nuijten W, et al. Combining deep reinforcement learning with search heuristics for solving multi-agent path finding in segment-based layouts[C]//Symposium Series on Computational Intelligence, 2020. |
| 35 | Liu Z, Chen B, Zhou H, et al. Mapper: Multi-agent path planning with evolutionary reinforcement learning in mixed dynamic environments[C]//Institute of Electrical and Electronics Engineers, 2020. |
| 36 | Huang T, Dilkina B, Koenig S. Learning node-selection strategies in bounded suboptimal conflict-based search for multi-agent path finding[C]//International Joint Conference on Autonomous Agents and Multi-Agent Systems, 2021. |
| 37 |
SkrynnikA,YakovlevaA,DavydovV,et al.Hybrid policy learning for multiagent pathfinding[J].IEEE Access,2021,9,126034-126047.
doi: 10.1109/ACCESS.2021.3111321 |
| 38 | Huang T, Li J, Koenig S, et al. Anytime multi-agent path finding via machine learning-guided large neighborhood search[C]//Association for the Advancement of Artificial Intelligence, 2022. |
| 39 | Abreu N. Efficient deep learning for multi agent pathfinding[C]//Association for the Advancement of Artificial Intelligence, 2022. |
| 40 | Guan H, Gao Y, Zhao M, et al. AB-mapper: Attention and BicNet based multi-agent path planning for dynamic environment[C]//Institute of Electrical and Electronics Engineers, 2022. |
| 41 | Ma H, Tovey C, Sharon G, et al. Multi-agent path finding with payload transfers and the package-exchange robot-routing problem[C]//Association for the Advancement of Artificial Intelligence, 2016. |
| 42 | Felner A, Stern R, Shimony S, et al. Search-based optimal solvers for the multiagent pathfinding problem: Summary and challenges[C]//Annual Symposium on Combinatorial Search, 2017. |
| 43 | Surynek P, Felner A, Stern R, et al. An empirical comparison of the hardness of multi-agent path finding under the makespan and the sum of costs objectives[C]//Annual Symposium on Combinatorial Search, 2016. |
| 44 | Barták R, Zhou N F, Stern R, et al. Modeling and solving the multi-agent pathfinding problem in picat[C]//International Conference on Tools with Artificial Intelligence, 2017. |
| 45 | Ma H, Harabor D, Stuckey P J, et al. Searching with consistent prioritization for multi-agent path finding[C]//Association for the Advancement of Artificial Intelligence, 2019. |
| 46 | Ma H, Wagner G, Felner A, et al. Multi-agent path finding with deadlines[C]//International Joint Conference on Artificial Intelligence, 2018. |
| 47 |
SturtevantN R.Benchmarks for grid-based pathfinding[J].IEEE Transactions on Computational Intelligence and AI in Games,2012,4(2):144-148.
doi: 10.1109/TCIAIG.2012.2197681 |
| 48 |
MaH,KoenigS.AI buzzwords explained: Multi-agent path finding[J].AI Matters,2017,3(3):15-19.
doi: 10.1145/3137574.3137579 |
| 49 | Cohen L, Greco M, Ma H, et al. Anytime focal search with applications[C]//International Joint Conference on Artificial Intelligence, 2018. |
| 50 | Cohen L, Uras T, Koenig S. Feasibility study: Using highways for bounded-suboptimal multi-agent path finding[C]//Annual Symposium on Combinatorial Search, 2015. |
| 51 | Ma H, Hönig W, Kumar T S, et al. Lifelong path planning with kinematic constraints for multi-agent pickup and delivery[C]//Association for the Advancement of Artificial Intelligence, 2019. |
| 52 | Švancara J, Vlk M, Stern R, et al. Online multi-agent pathfinding[C]//Association for the Advancement of Artificial Intelligence, 2019. |
| 53 |
GebserM,ObermeierP,OttoT,et al.Experimenting with robotic intra-logistics domains[J].Theory and Practice of Logic Programming,2018,18(3-4):502-519.
doi: 10.1017/S1471068418000200 |
| 54 | Erdem E, Kisa D, Oztok U, et al. A general formal framework for pathfinding problems with multiple agents[C]//Proceedings of the AAAI Conference on Artificial Intelligence, 2013, 27(1): 290-296. |
| 55 | Surynek P, Felner A, Stern R, et al. Efficient SAT approach to multi-agent path finding under the sum of costs objective[C]//European Conference on Artificial Intelligence, 2016. |
| 56 | Surynek P, Felner A, Stern R, et al. Modifying optimal SAT-based approach to multi-agent path-finding problem to suboptimal variants[C]//Annual Symposium on Combinatorial Search, 2017. |
| 57 | Surynek P. Reduced Time-expansion graphs and goal decomposition for solving cooperative path finding sub-optimally[C]//International Joint Conference on Artificial Intelligence, 2015. |
| 58 | Wang J, Li J, Ma H, et al. A new constraint satisfaction perspective on multiagent path finding: Preliminary results[C]//International Joint Conference on Autonomous Agents and Multi-Agent Systems, 2019. |
| 59 | Han S D, Yu J. Integer programming as a general solution methodology for path-based optimization in robotics: Principles, best practices, and applications[C]//Institute of Electrical and Electronics Engineers, 2019. |
| 60 | Sajid Q, Luna R, Bekris K. Multi-agent pathfinding with simultaneous execution of single-agent primitives[C]//Annual Symposium on Combinatorial Search, 2012. |
| 61 | Khorshid M, Holte R, Sturtevant N. A polynomial-time algorithm for nonoptimal multi-agent pathfinding[C]//Annual Symposium on Combinatorial Search, 2011. |
| 62 | Masehian E, Nejad A H. Solvability of multi robot motion planning problems on trees[C]//Institute of Electrical and Electronics Engineers, 2009. |
| 63 | Surynek P. A novel approach to path planning for multiple robots in bi-connected graphs[C]//International Conference on Robotics and Automation, 2009. |
| 64 |
BoteaA,BonusiD,SurynekP.Solving multi-agent path finding on strongly biconnected digraphs[J].Journal of Artificial Intelligence Research,2018,62,273-314.
doi: 10.1613/jair.1.11212 |
| 65 |
GoldenbergM,FelnerA,SternR,et al.Enhanced partial expansion A$.*$[J].Journal of Artificial Intelligence Research,2014,50,141-187.
doi: 10.1613/jair.4171 |
| 66 |
WagnerG,ChosetH.Subdimensional expansion for multirobot path planning[J].Artificial intelligence,2015,219,1-24.
doi: 10.1016/j.artint.2014.11.001 |
| 67 | Silver D. Cooperative pathfinding[C]//Proceedings of the First Artificial Intelligence and Interactive Digital Entertainment Conference, 2005. |
| 68 | Sturtevant N, Buro M. Improving collaborative pathfinding using map abstraction[C]//Proceedings of the First Artificial Intelligence and Interactive Digital Entertainment Conference, 2006. |
| 69 | Wang K H C, Botea A, et al. Fast and memory-efficient multi-agent pathfinding[C]//The International Conference on Automated Planning and Scheduling. 2008, 8: 380-387. |
| 70 | Bnaya Z, Felner A. Conflict-oriented windowed hierarchical cooperative A$.*$[C]//International Conference on Robotics and Automation, 2014. |
| 71 | Sigurdson D, Bulitko V, Yeoh W, et al. Multi-agent pathfinding with real-time heuristic search[C]//IEEE Conference on Computational Intelligence and Games, 2018. |
| 72 |
OkumuraK,MachidaM,DéfagoX,et al.Priority inheritance with backtracking for iterative multi-agent path finding[J].Artificial Intelligence,2022,310,103752.
doi: 10.1016/j.artint.2022.103752 |
| 73 | Li J, Chen Z, Harabor D, et al. Anytime multi-agent path finding via large neighborhood search[C]//International Joint Conference on Artificial Intelligence, 2021. |
| 74 | Shaw P. Using constraint programming and local search methods to solve vehicle routing problems[C]//International Conference on Principles and Practice of Constraint Programming, 1998. |
| 75 | Li J, Chen Z, Harabor D, et al. MAPF-LNS2: Fast repairing for multi-agent path finding via large neighborhood search[C]//Association for the Advancement of Artificial Intelligence, 2022. |
| 76 |
SharonG,SternR,GoldenbergM,et al.The increasing cost tree search for optimal multi-agent pathfinding[J].Artificial intelligence,2013,195,470-495.
doi: 10.1016/j.artint.2012.11.006 |
| 77 |
SharonG,SternR,FelnerA,et al.Conflict-based search for optimal multi-agent pathfinding[J].Artificial Intelligence,2015,219,40-66.
doi: 10.1016/j.artint.2014.11.006 |
| 78 | Boyarski E, Felner A, Stern R, et al. Icbs: The improved conflict-based search algorithm for multi-agent pathfinding[C]//Annual Symposium on Combinatorial Search, 2015. |
| 79 | Felner A, Li J, Boyarski E, et al. Adding heuristics to conflict-based search for multi-agent path finding[C]//The International Conference on Automated Planning and Scheduling, 2018. |
| 80 | Li J, Felner A, Boyarski E, et al. Improved heuristics for multi-agent path finding with conflict-based search[C]//International Joint Conference on Artificial Intelligence, 2019. |
| 81 | Li J, Harabor D, Stuckey P J, et al. Disjoint splitting for multi-agent path finding with conflict-based search[C]//The International Conference on Automated Planning and Scheduling, 2019. |
| 82 | Boyarski E, Felner A, Harabor D, et al. Iterative-deepening conflict-based search[C]//International Joint Conference on Artificial Intelligence, 2021. |
| 83 | Li J, Harabor D, Stuckey P J, et al. Symmetry-breaking constraints for gridbased multi-agent path finding[C]//Association for the Advancement of Artificial Intelligence, 2019. |
| 84 |
LiJ,HaraborD,StuckeyP J,et al.Pairwise symmetry reasoning for multi-agent path finding search[J].Artificial Intelligence,2021,301,103574.
doi: 10.1016/j.artint.2021.103574 |
| 85 |
ZhangH,LiJ,SurynekP,et al.Multi-agent path finding with mutex propagation[J].Artificial Intelligence,2022,311,103766.
doi: 10.1016/j.artint.2022.103766 |
| 86 | Barer M, Sharon G, Stern R, et al. Suboptimal variants of the conflict-based search algorithm for the multi-agent pathfinding problem[C]//Annual Symposium on Combinatorial Search, 2014. |
| 87 | Cohen L, Uras T, Kumar T S, et al. Improved solvers for bounded-suboptimal multi-agent path finding[C]//International Joint Conference on Artificial Intelligence, 2016. |
| 88 | Li J, Ruml W, Koenig S. Eecbs: A bounded-suboptimal search for multi-agent path finding[C]//Association for the Advancement of Artificial Intelligence, 2021. |
| 89 | Surynek P. Unifying search-based and compilation-based approaches to multiagent path finding through satisfiability modulo theories[C]//Annual Symposium on Combinatorial Search, 2019. |
| 90 | Gange G, Harabor D, Stuckey P J. Lazy CBS: Implicit conflict-based search using lazy clause generation[C]//The International Conference on Automated Planning and Scheduling, 2019. |
| 91 |
LamE,Le BodicP,HaraborD,et al.Branch-and-cut-and-price for multi-agent path finding[J].Computers and Operations Research,2022,144,105809.
doi: 10.1016/j.cor.2022.105809 |
| 92 | Lam E, Le Bodic P. New valid inequalities in branch-and-cut-and-price for multiagent path finding[C]//The International Conference on Automated Planning and Scheduling, 2020. |
| 93 | WangK,BoteaA.MAPP: A scalable multi-agent path planning algorithm with tractability and completeness guarantees[J].Journal of Artificial Intelligence Research,2011,42,55-90. |
| 94 | Ryan M. Constraint-based multi-robot path planning[C]//International Conference on Robotics and Automation, 2010. |
| 95 | Ederer I. Enhancing meta-agent conflict-based search for the multi-agent pathfinding problem with informed merging and heuristics[D]. Republik Österreich: Technische Universität Wien, 2021. |
| 96 | Langlois S T. Decentralized multiagent metareasoning applications in task allocation and path finding[D]. Maryland: University of Maryland, College Park, 2021. |
| 97 | Zhang S, Li J, Huang T, et al. Learning a priority ordering for prioritized planning in multi-agent path finding[C]//Annual Symposium on Combinatorial Search, 2022. |
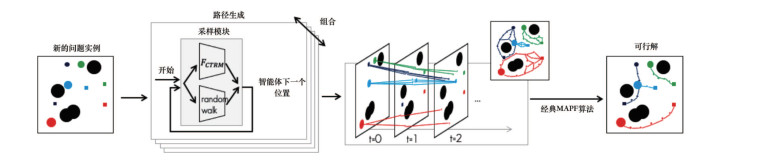
| 98 | Okumura K, Yonetani R, Nishimura M, et al. CTRMs: Learning to construct cooperative timed roadmaps for multi-agent path planning in continuous spaces[C]//International Joint Conference on Autonomous Agents and Multi-Agent Systems, 2022. |
| 99 | Ren J, Sathiyanarayanan V, Ewing E, et al. MAPFAST: A deep algorithm selector for multi agent path finding using shortest path embeddings[C]//International Joint Conference on Autonomous Agents and Multi-Agent Systems, 2021. |
| 100 | Kaduri O, Boyarski E, Stern R. Algorithm selection for optimal multi-agent pathfinding[C]//The International Conference on Automated Planning and Scheduling, 2020. |
| 101 | Sigurdson D, Bulitko V, Koenig S, et al. Automatic algorithm selection in multiagent pathfinding[J]. 2019, arXiv: 1906.03992. |
| 102 | Ren J, Sathiyanarayanan V, Ewing E, et al. Automatic optimal multi-agent path finding algorithm selector[C]//Association for the Advancement of Artificial Intelligence, 2021. |
| 103 | Alkazzi J M, Rizk A, Salomon M, et al. MAPFASTER: A faster and simpler take on multi-agent path finding algorithm selection[C]//Institute of Electrical and Electronics Engineers, 2022. |
| 104 |
DamaniM,LuoZ,WenzelE,et al.PRIMAL$_2$: Pathfinding via reinforcement and imitation multi-agent learning-lifelong[J].IEEE Robotics and Automation Letters,2021,6(2):2666-2673.
doi: 10.1109/LRA.2021.3062803 |
| 105 | Virmani L, Ren Z, Rathinam S, et al. Subdimensional expansion using attention-based learning for multi-agent path finding[J]. 2021, arXiv: 2109.14695. |
| 106 |
WangB,LiuZ,LiQ,et al.Mobile robot path planning in dynamic environments through globally guided reinforcement learning[J].IEEE Robotics and Automation Letters,2020,5(4):6932-6939.
doi: 10.1109/LRA.2020.3026638 |
| 107 | Chen L, Wang Y, Miao Z, et al. Multi-agent path finding using imitation-reinforcement learning with transformer[C]//IEEE International Conference on Robotics and Biomimetics, 2022. |
| 108 | Wang Y, Xiang B, Huang S, et al. SCRIMP: Scalable communication for reinforcement-and imitation-learning-based multi-agent pathfinding[J]. 2023, arXiv: 2303.00605. |
| 109 | Bignoli A. Graph attentional neural network in multi-agent pickup and delivery problems[D]. Milano: Politecnico di Milano, 2022. |
| 110 | Li Q, Gama F, Ribeiro A, et al. Graph neural networks for decentralized multirobot path planning[C]//Institute of Electrical and Electronics Engineers, 2020. |
| 111 |
LiQ,LinW,LiuZ,et al.Message-aware graph attention networks for large-scale multi-robot path planning[J].IEEE Robotics and Automation Letters,2021,6(3):5533-5540.
doi: 10.1109/LRA.2021.3077863 |
| 112 | Sinkar M, Izhan M, Nimkar S, et al. Multi-agent path finding using dynamic distributed deep learning model[C]//The IEEE International Conference on Communication, Information and Computing Technology, 2021. |
| 113 | Ma J, Lian D. Attention-cooperated reinforcement learning for multi-agent path planning[C]//Database Systems for Advanced Applications, 2022. |
| 114 | Ma Z, Luo Y, Ma H. Distributed heuristic multi-agent path finding with communication[C]//International Conference on Robotics and Automation, 2021. |
| 115 | MaZ,LuoY,PanJ.Learning selective communication for multi-agent path finding[J].IEEE Robotics and Automation Letters,2021,7(2):1455-1462. |
| 116 | Ye Z, Li Y, Guo R, et al. Multi-agent pathfinding with communication reinforcement learning and deadlock detection[C]//International Conference on Intelligent Robotics and Applications, 2022. |
| 117 | Xu Y, Li Y, Liu Q, et al. Multi-agent pathfinding with local and global guidance[C]//International Conference on Networking, Sensing and Control, 2021. |
| 118 | Davydov V, Skrynnik A, Yakovlev K, et al. Q-mixing network for multi-agent pathfinding in partially observable grid environments[C]//The Royal Australian Chemical Institute, 2021. |
| 119 | Van Knippenberg M, Holenderski M, Menkovski V. Time-constrained multi-agent path finding in non-lattice graphs with deep reinforcement learning[C]//Asian Conference on Machine Learning, 2021. |
| [1] | Hu SHAO, Yue ZHUO, Pengjie LIU, Feng SHAO. Operational research methods for urban traffic flow estimation [J]. Operations Research Transactions, 2023, 27(2): 27-48. |
| [2] | Yun HUA, Xiangfeng WANG, Bo JIN. Multi-agent deep reinforcement learning-based urban traffic signal management [J]. Operations Research Transactions, 2023, 27(2): 49-62. |
| [3] | ZHANG Huiling, XU Yang, XU Zi. Block alternating proximal gradient algorithm for convex-nonconcave minimax problems [J]. Operations Research Transactions, 2022, 26(4): 64-74. |
| [4] | XU Zi, ZHANG Huiling. Optimization algorithms and their complexity analysis for non-convex minimax problems [J]. Operations Research Transactions, 2021, 25(3): 74-86. |
| [5] | CHEN Zheng, GAO Yan. Approximating viability kernel for control systems [J]. Operations Research Transactions, 2013, 17(4): 24-32. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||